
 产品:128
产品:128
 联系我们
联系我们

库卡机器人仿真编程(Frame
众所周知,库卡机器人坐标系的欧拉角表示法 XYZABC,其中XYZ是线性距离,ABC则是旋转角度(即欧拉角)。库卡机器人的笛卡尔变换的顺序是:Z->Y->X,即A->B->C(Rz->Ry->Rx),并且以当前的姿态作为参考。 在库卡机器人编程环境中,经常会碰到一个系统结构体类型数据
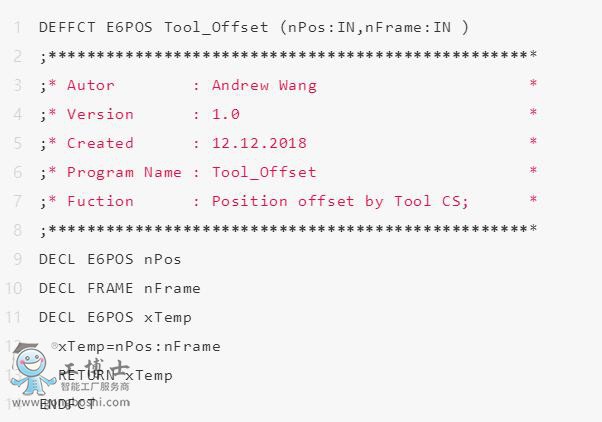
1.计算基于工具坐标系的位置偏移
目的:计算当前同一坐标系下的点相对工具坐标系偏移后的位置;
目的:计算当前同一坐标系下的点相对基坐标系偏移后的位置;

目的:通过赋值的方式获取设定一个需要的

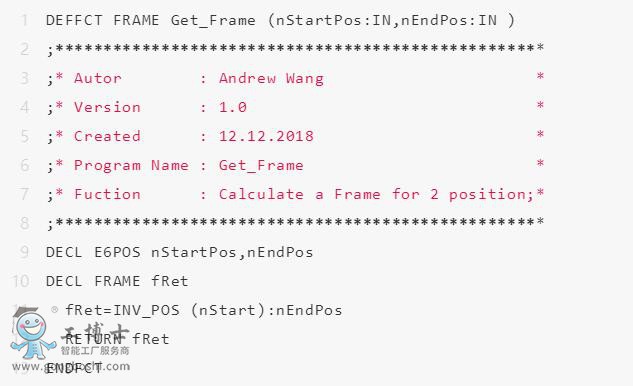
4.计算两个点之间的向量
目的:通过两个点计算出两点之间的相对位置向量;
更多资讯请点击:库卡机器人