
 产品:128
产品:128
 联系我们
联系我们

按标准每个机器人有16条互锁指令,这些指令固定分配给输入/输出信号。每个互锁输入信号在在线运行条件中强制检测。

机器人互锁编程例参考:
1: PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=1 SPSTrig=5 [1/100s]
1: FB PSPS = EIN
2: A23 = AUS
3: t3 ( EIN ) = 0[1/10Sek] 启动UP节拍时间测量
4: SPS MAKRO50 = EIN 标志位Merker初始化
5: A81 = EIN 互锁请求 1
6: A82 = EIN 互锁请求2
7: A83 = EIN 互锁请求3
8: SPSMAKRO20 = EIN ~ Roboter Verriegelungen aktivieren 激活机器人互锁
重要提示:Makro20必须强制在互锁请求的同一点调用!!!
9: WARTE BIS E23
10: A23 = EIN
11: FB PSPS = E14 & E24 & E41 & E42 & E43 & E80 & M95
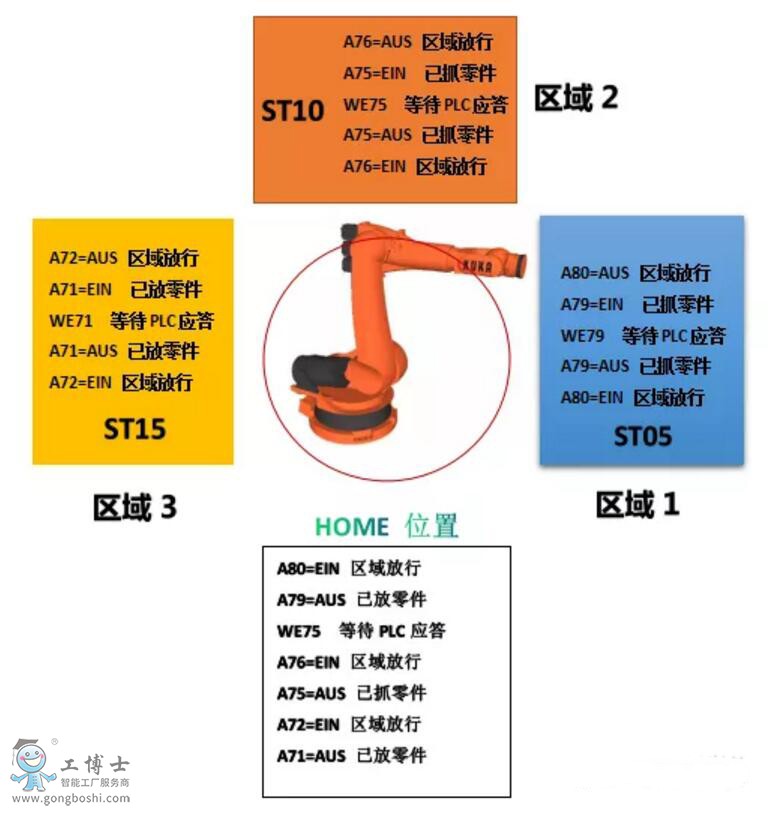
按标准每个机器人有24个位置放行信号,这些信号固定分配给输入/输出信号。如果机器人与多个工位工作,机器人与设备之间的工具放行信号应编程在区域中。
例如
更多资讯请点击:库卡机器人