
 产品:128
产品:128
 联系我们
联系我们

1、基坐标系(Base Coordinate System)
2、大地坐标系(World Coordinate System)
3、工具坐标系(Tool Coordinate System)
4、工件坐标系(Work Object Coordinate System)
工业机器人的坐标形式有直角坐标型、圆柱坐标型、球坐标型、关节坐标型和平面关节型。
KUKA库卡机器人默认有16个TOOL和32个BASE,记得有个学员当时做一个使用机器人KUKA调酒和咖啡的项目,类似于下图,由于瓶子和杯子的数量以及型号太多,默认的个工具数量根本不够用。

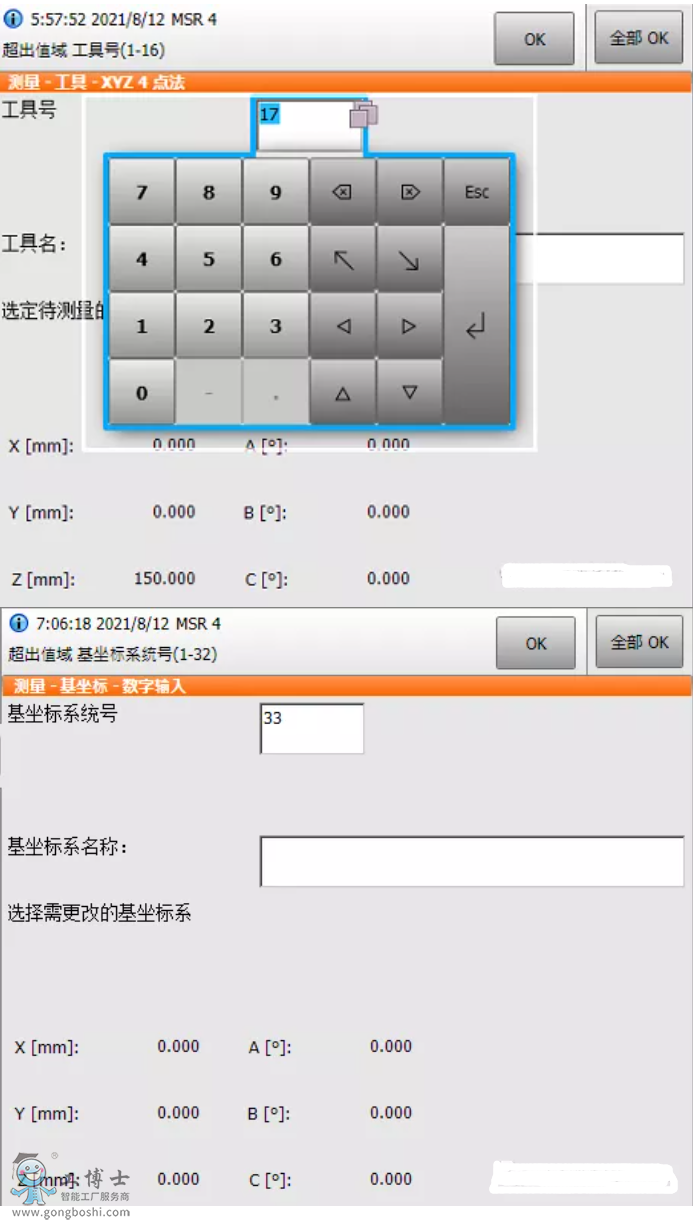
1、正常我们在定义工具数据和基座标的时候,使用超过默认时,会有下图的信息提示:“超出值域工具号(1-16)”、“超出值域基座标系统号(1-32)”
工具数量扩展:

更改完之后就可以使用任意方法定义里面的数据了。
对于四大家族,ABB的工具数据和工件坐标如存储空间OK的话,貌似可以创建无数个,对于FANUC和安川默认的数量也是有限的,当然也有各自的方法进行扩展。
注:本文章文字、图片部分来自网络
版权归原作者,侵删。

工博士可以提供了ABB,库卡,安川,发那科和欧地希等各种常用机器人型号,并且包括机器人的配件,保养,维修,培训等等服务我们都可以进行服务,真正做到了为客户进行一站式的服务保障,并且工博士现已经是集九大机器人代理于一体的智能工厂一站式服务商,我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线留言或致电与我们联系 。
库卡机器人产品资料,技术选型,操作编程,技术调试,售后培训
详情可咨询:库卡机器人授权服务商