
 产品:128
产品:128
 联系我们
联系我们

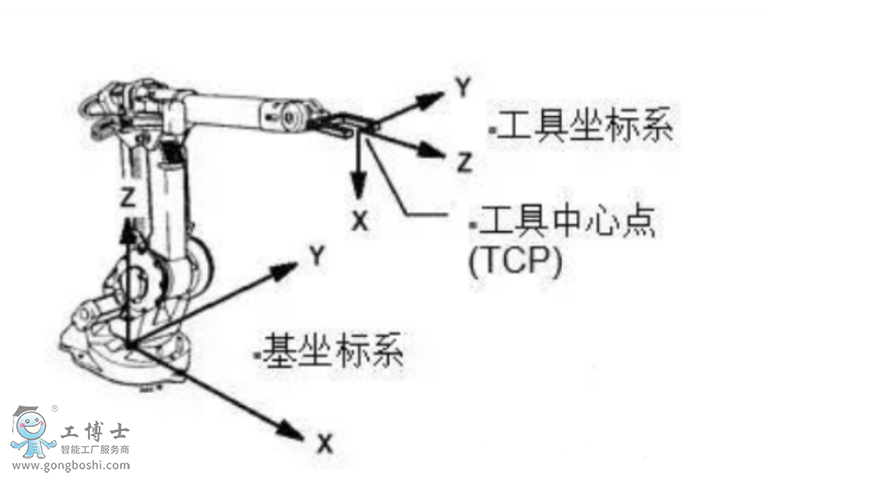
TCP指的是工具中心点(Tool Center Point,TCP)。
为完成各种作业任务,需要在工业机器人末端安装各种不同的工具,如喷枪、抓手、焊枪等。由于工具的形状、大小各不相同,在更换或者调整工具之后,机器人的实际工作点相对于机器人末端的位置会发生变化。
目前普遍采用的方法是在库卡机器人工具上建立一个工具坐标系,其原点即为工具中心点(Tool Center Point,TCP)。
库卡机器人在此坐标系内进行编程,当工具调整后,只需重新标定工作坐标系的位姿,即可使机器人重新投入使用。
TCP 的类型
1、常规 TCP
无论是何种***的工业机器人,事先都定义了一个工具坐标系,无一例外地将这个坐标系XY平面绑定在机器人第六轴的法兰盘平面上,坐标原点与法兰盘中心重合。
显然,这时TCP就在法兰盘中心。不同***的机器人有不同的称呼,ABB机器人把这个工具坐标系称为tool0,REIS机器人称之为 _tnull。
2、固定 TCP
前面介绍的TCP是跟随机器人本体一起运动,但是也可以将TCP定义为机器人本体以外静止的某个位置。常应用在涂胶上,胶罐喷嘴静止不动,机器人抓取工件移动。其本质是一个工件坐标系。
3、动态 TCP
前面介绍的TCP是相对于机器人本体法兰盘坐标系,或者大地坐标系,但随着更复杂的应用,TCP可以延伸到机器人本体轴外部,应用在TCP需要相对法兰盘做动态变化的场合。这种可称之为动态工具( Dynamic Tool),其TCP可称之为动态TCP 。
注:本文章文字、图片部分来自网络
版权归原作者,侵删。
工博士可以提供了ABB,库卡,安川,发那科和欧地希等各种***机器人和常用机器人型号,并且包括机器人的配件,保养,维修,培训等等服务我们都可以进行服务,真正做到了为客户进行一站式的服务保障,并且工博士现已经是集九大机器人代理***于一体的智能工厂一站式服务商,我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线留言或致电与我们联系 。
库卡机器人产品资料,技术选型,操作编程,技术调试,售后培训
详情可咨询:库卡机器人授权服务商
- 下一篇:库卡机器人镇流电路过载报警
- 上一篇:库卡机器人KUKA的编程语言简介!