
 产品:128
产品:128
 联系我们
联系我们

注:本文章文字、图片部分来自网络
版权归原作者,侵删。
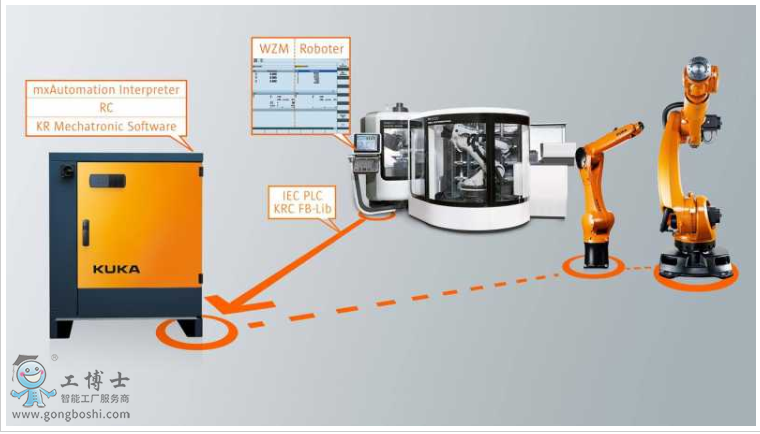
下面以文字结合图片的形式,讲述一下西门子S71200与KUKA库卡机器人的组态、通讯和编程。

第二步:安装KUKA库卡机器人GSD文件。

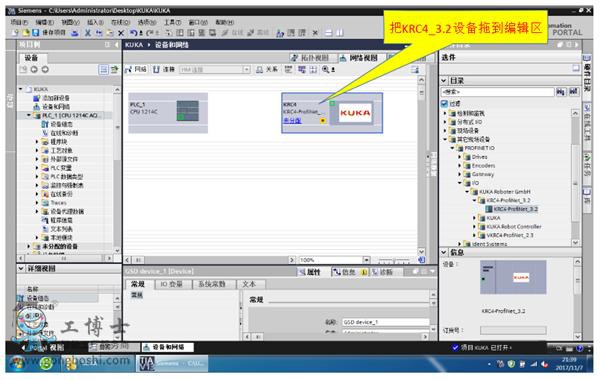
第三步:在硬件目录选中“KRC4_3.2”硬件组件。

第四步:把选中的硬件组件拖放到网络视图编辑区。
第五步:为CPU1214C添加PROFINET子网,并设置IP地址192.168.0.1。

第六步:将KUKA硬件组件分配到PROFINET子网,点击“未分配”。

第七步:选中KUKA网络接口,点击鼠标左键,在以太网地址对话框设置IP地址为192.168.0.2和PROFINET I/O设备名称为KRC4。

第八步:进入KUKA设备视图删除64个I/O安全模块和256个I/O模块。

第九步:重新添加I/O模块,将64个I/O模块添加到模块列表,之后编译下载硬件组态。

第十步:双击“WORK VISUAL”图标,打开KUKA机器人设置软件。
第十一步:在项目浏览器中选择“KRC4”项目模板

第十二步:在项目结构选中“控制器”点击鼠标右键,选择“设为激活控制器”

第十三步:选择对应的固件版本,点击“OK”按钮

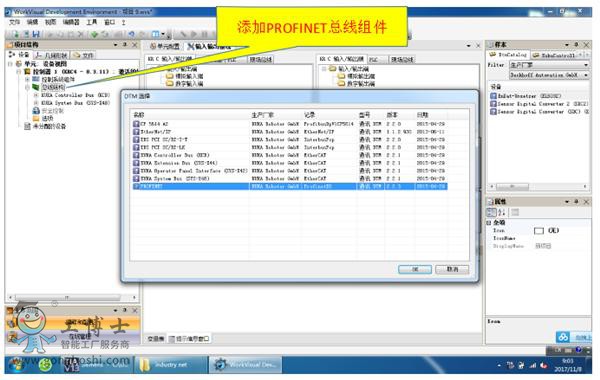
第十四步:在项目结构选中“总线结构”点击鼠标右击,添加PROFINET总线组件
第十五步:在项目结构选中“PROFINET”点击鼠标右击,添加PROFINET I/O设备。

第十六步:双击“KRC4-PROFINET_3.2”设置KUKA总线IP地址为192.168.0.2和设备名称为“KRC4”,确保与PLC组态的名称一致。

第十七步:将KUKA输入端口映射到PROFINET I/O地址

第十八步:将KUKA输出端口映射到PROFINET I/O地址

第十九步:下图是KUKA机器人输入和输出端口已映射完成的画面

第二十步:点击“安装”按钮将配置下载到控制器。

第二十一步:点击“生成代码”按钮

第二十二步:下图是机器人和S71200的输入和输出地址对应。

第二十三步:通过MOVE指令完成机器人程序号选择和程序号选中监控

1
工博士可以提供了ABB,库卡,安川,发那科和欧地希等各种品牌机器人和常用机器人型号,并且包括机器人的配件,保养,维修,培训等等服务我们都可以进行服务,真正做到了为客户进行一站式的服务保障,并且工博士现已经是集九大机器人代理品牌于一体的智能工厂一站式服务商,我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线留言或致电与我们联系 。
库卡机器人产品资料,技术选型,操作编程,技术调试,售后培训
详情可咨询:库卡机器人授权服务商